Semantic segmentation for autonomous vehicles
 Robo Cart
Robo Cart
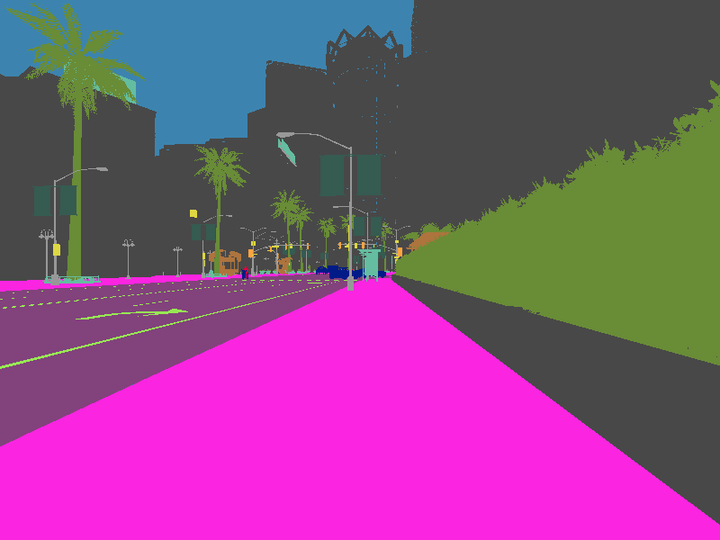
We worked on an autonomous delivery robot project, focusing on real-time semantic segmentation for autonomous driving on edge devices. Our model adeptly handled a range of environmental challenges, including varying weather conditions and day-to-night transitions, ensuring robust and reliable robot navigation.